
Avete mai osservato da vicino la coda di un cavalluccio marino, anche solo in foto? Se lo avete fatto, vi sarete probabilmente accorti che essa è composta da piccoli segmenti di forma quadrata, solitamente circa 36, sovrapposti l’uno all’altro e via via più piccoli man mano che ci si avvicina alla punta. Un gruppo di scienziati della Clemson University (Usa) si è chiesto il perché di questa peculiare forma, e ha scoperto che questa conformazione la rende molto più resistente e adatta ad afferrare rispetto a una normale coda cilindrica. I risultati, pubblicati in uno studio su Science, potrebbero avere importanti applicazioni mediche, e soprattutto essere sfruttati nel fervente campo della robotica.
“Quasi tutti gli animali hanno code a sezione circolare o ovale,” ha spiegato Michael Porter, che ha condotto la ricerca: “Ma non il cavalluccio marino. Ci siamo chiesti perché e abbiamo scoperto che una coda a sezione quadrata è assai migliore per afferrare e dal punto di vista della resistenza costituisce una vera e propria armatura”. Porter ha anche aggiunto che queste piccole placche quadrate rendono la coda più rigida, forte e resistente agli sforzi, tutto allo stesso tempo. Normalmente migliorare una di queste tre caratteristiche automaticamente indebolirebbe le altre due, tuttavia questo non succede per i cavallucci marini, e i ricercatori hanno cercato di capire il perché, principalmente tramite la stampa 3D di diversi modelli semplificati di code di cavallucci marini, in grado di piegarsi, comprimersi e arrotolarsi.
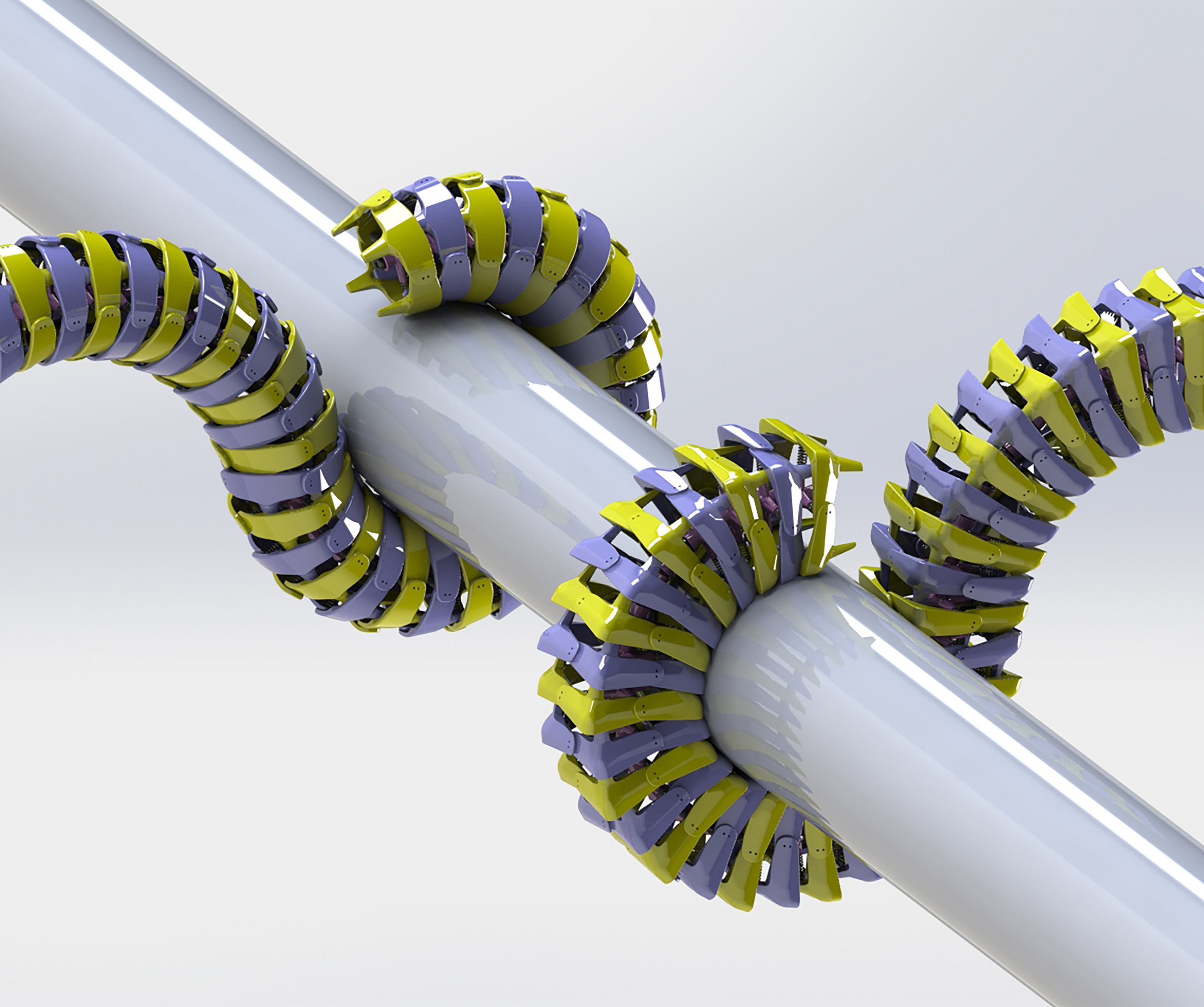
Meglio cilindrica o quadrata? (foto: Michael Porter/Clemson University)
“Nuove tecnologie come la stampa 3D ci permettono di imitare strutture biologiche, ma anche di costruire modelli ipotetici che non è possibile trovare in natura,” ha spiegato Porter: “Possiamo testarli e vedere quali funzionano meglio per trovare nuove applicazioni ingegneristiche, ma anche per spiegare come mai alcune strutture biologiche si sono evolute in un certo modo”.
Dai test effettuati su diversi modelli quadrati, ovali e circolari, gli scienziati hanno ricollegato queste peculiari caratteristiche al fatto che le placche quadrate hanno un solo grado di libertà quando si muovono: possono, quindi, solamente scorrere avanti o indietro. Diversamente, le placche circolari hanno due gradi di libertà, possono scorrere e ruotare. Di conseguenza, le placche quadrate sono in grado di assorbire molta più energia prima di arrivare al punto di rottura. Inoltre sono in grado di ritornare alla forma originale più in fretta, utilizzando solo una quantità di energia minima, senza contare che nell’atto di afferrare dispongono di una maggiore superficie di contatto rispetto a una struttura cilindrica.
Ma in che modo queste caratteristiche potrebbero trovare un’applicazione pratica? Secondo Porter, si potrebbe per esempio aumentare la scala della struttura per creare braccia robotiche in grado di lavorare in condizioni ostili, oppure ridurre le dimensioni per utilizzare strutture simili per creare cateteri migliori.
Riferimenti: Science doi: 10.1126/science.aaa6683
Credits immagine di copertina: Dominique Adriaens, UGent



{kind=link}
Nella meccanica legata alla robotica,oramai c’è rimasto poco da scoprire,ulteriori progressi si possono ottenere solo dalla scoperta di nuovi materiali e nuove tecnologie.
Tornando al tema,ad occhio e croce,direi che lo scopo evolutivo che ha portato a questa particolare struttura della coda del cavalluccio marino,sia stato principalmente quello del risparmio energetico.