(Iit) – Spegnere gli incendi e supportare le squadre di emergenza come un “avatar” robotico sono i compiti per cui è stata testata una nuova versione del robot umanoide WALK-MAN all’Istituto Italiano di Tecnologia di Genova (Iit). Il robot è in grado di localizzare le fiamme di un incendio, camminare verso di esse ed attivare un estintore per spegnerle, mentre un operatore lo guida da lontano. L’ultima versione dell’umanoide ha un nuovo design, più leggero di 31 chili grazie all’utilizzo di leghe di magnesio, e nuove mani più abili nelle manipolazioni. Il nuovo design è stato pensato per ridurre i costi di costruzione e migliorare le prestazioni in termini energetici.
Nel giugno 2015, WALK-MAN era stato l’unico progetto italiano e finanziato dall’Unione Europea a partecipare a Los Angeles alla gara internazionale di robotica DARPA Robotics Challenge (DRC), promossa per definire gli standard tecnologici dei robot capaci di fornire assistenza in caso di disastri naturali o provocati dall’uomo. Durante la sfida il robot aveva affrontato uno scenario ispirato all’incidente nucleare di Fukushima. Nel 2016 WALK-MAN è stato testato in uno scenario reale, in seguito al terremoto di Amatrice, all’interno di edifici danneggiati per eseguire un’ispezione della struttura e fornire informazioni sulla stabilità dell’edificio.
Nella sua ultima prova il robot WALK-MAN ha affrontato uno scenario definito dai ricercatori insieme alla Protezione Civile di Firenze: un impianto industriale danneggiato da un terremoto in cui sono presenti detriti, fughe di gas e fuoco, quindi una situazione pericolosa per l’uomo. Lo scenario è stato ricreato in laboratorio attraverso la costruzione di un ambiente fittizio, dove WALK-MAN è stato in grado di muoversi ed eseguire quattro compiti specifici: aprire e attraversare una porta per entrare nella zona, localizzare una valvola di tipo industriale e chiuderla, così da simulare l’interruzione della perdita di gas, rimuovere gli ostacoli sul suo percorso, e infine identificare la posizione delle fiamme e attivare l’estintore.
Crediti video: © 2018 IIT. Autore: D.Farina
Durante l’operazione Walk-Man è stato controllato a distanza da un operatore umano tramite un’interfaccia virtuale e una tuta sensorizzata, vestita dall’operatore, che consente di azionare il robot in modo naturale, controllandone la manipolazione e la locomozione, come un avatar. L’operatore riceve in modo continuo immagini e informazioni dai sistemi di percezione del robot.
La nuova versione di Walk-Man presenta la parte superiore del corpo (busto e braccia) più leggera, la cui realizzazione ha richiesto 6 mesi, coinvolgendo una squadra di circa 10 ricercatori coordinata da Nikolaos Tsagarakis, ricercatore presso Iit e coordinatore del progetto. Il robot è alto 1,85 metri ed è realizzato in metallo leggero, come ergal (60%), leghe di magnesio (25%) e titanio, ferro e plastica. I ricercatori hanno ridotto il suo peso di 31 chili – dai 133 chili originari, a 102 chili – per rendere il robot più dinamico. Le gambe possono muoversi più velocemente avendo una massa superiore del corpo più leggera da trasportare. Inoltre, il robot riesce a reagire più velocemente a spinte esterne, realizzando dei passi laterali per mantenere l’equilibrio; una caratteristica che gli permette di adattare il proprio passo a terreni accidentati o a situazioni in cui l’interazione con l’ambiente è variabile. L’alleggerimento del busto ha permesso di ridurre anche il suo consumo di energia, utilizzando così una batteria da 1 kWh per operare circa due ore.
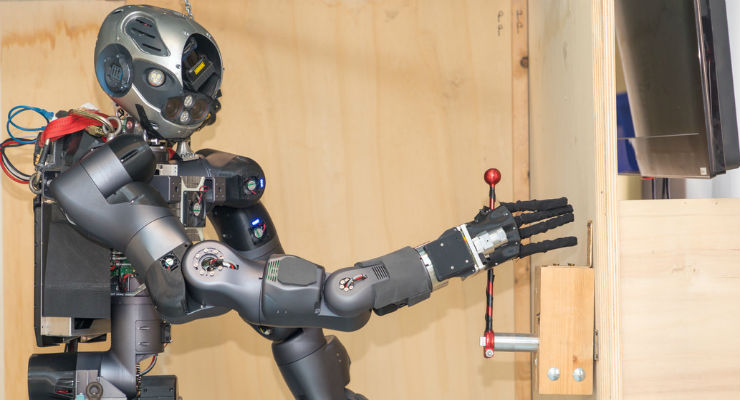
I nuovi busto e braccia sono realizzati in leghe di magnesio e altri compositi, e presentano una nuova versione di attuatori che hanno ottimizzato le prestazioni: la capacità di carico è più elevata (10 kg/braccio) rispetto alla prima versione (7 kg/braccio), e può trasportare e sostenere oggetti pesanti per un periodo di 10 minuti. La nuova parte di corpo ha anche dimensioni più compatte: la larghezza delle spalle è di 62 cm e la profondità del busto è di 31 cm, conferendo al robot un profilo più adeguato per passare attraverso le porte e i passaggi stretti.
Le mani sono una nuova versione delle mani robotiche Soft-Hand sviluppate dal Centro Ricerche E. Piaggio dell’Università di Pisa (gruppo del Prof. A. Bicchi) in collaborazione con Iit. Le dita sono state costruite con un nuovo materiale composito leggero, e hanno un migliore rapporto dita-palmo (più simile a quello umano) che aumenta la varietà di forme degli oggetti che il robot può afferrare.
L’intero corpo di Walk-Man è controllato da 32 motori e schede di controllo, 4 sensori di forza e coppia (2 ai piedi e 2 alle mani) e 2 accelerometri per il controllo del suo equilibrio. Le sue articolazioni mostrano un movimento elastico che consente al robot di essere “morbido” nelle sue azioni e di avere interazioni sicure con l’uomo e l’ambiente. La sua architettura software è basata su framework XBotCore, piattaforma YARP, ROS e Gazebo. Nella testa sono presenti telecamere, scanner laser 3D e microfoni, e nel futuro potranno essere aggiunti sensori per riconoscere la presenza di sostanze tossiche.
Il progetto Walk-Man stato realizzato in collaborazione con altri partner internazionali, nell’ambito di un progetto finanziato dalla Commissione Europea dal 2013 e in fase di conclusione. Il progetto ha coinvolto un consorzio di istituti di ricerca composto dall’IIT, il Centro Ricerche E. Piaggio dell’Università di Pisa in Italia, l’École Polytechnique Fédérale di Losanna (EPFL) in Svizzera, il Karlsruhe Institute of Technology (KIT) in Germania e l’Université catholique de Louvain (UCL) in Belgio.
Riferimenti: Istituto Italiano di Tecnologia (Iit)


{kind=link}